Elegir el sensor de velocidad correcto para turbomachinería es de importancia crucial para una medición precisa y confiable. Después de todo, la señal del sensor es la entrada para un sistema de protección de sobrevelocidad. Un sensor defectuoso conduce a una señal de entrada no confiable, que tiene una influencia negativa en la precisión y confiabilidad del sistema de protección.
Hay varias consideraciones que deben hacerse para seleccionar el sensor adecuado, que se puede clasificar en consideraciones ambientales y relacionadas con la máquina.
Consideraciones de la máquina:
1. ¿Cuál es la velocidad mínima y máxima esperada?
2. ¿Cuál es el objetivo que se mide y cuáles son sus especificaciones?
3. ¿Hay limitaciones en el peso y el tamaño en la ubicación de montaje?
4. ¿Cuál es la longitud necesaria del cable?
Consideraciones ambientales:
1. ¿Cuál es la temperatura ambiente esperada?
2. ¿Tiene la medición en las áreas peligrosas de explosión (ATEX)?
3. ¿Son los campos electromagnéticos fuertes presentes?
4. ¿Tiene la medición en un entorno corrosivo?
Para mediciones de velocidad industrial hay tres tipos principales de principios de medición:
▪ Sensores de reticencia variable (VR): también conocidos como: sensores pasivos, sensores electromagnéticos o sensores de recogida magnética (MPU).
▪ Sensores de corrientes de Foucault (eddy current), también conocidos como: sensores de proximidad o sensores de desplazamiento.
▪ Sensores de efecto Hall: también conocidos como: sensores activos.
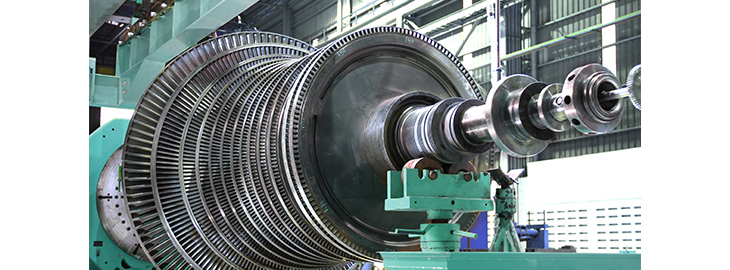
Sensores de reticencia variable (VR)
Un sensor VR utiliza un campo magnético para medir los cambios en la distancia entre la punta del sensor y el objeto de destino. El sensor contiene una bobina que se envuelve alrededor de un imán que causa un cambio en el campo magnético (flujo) y la bobina a medida que los dientes de un engranaje pasan el sensor. El engranaje móvil crea un flujo variable que induce un voltaje en la bobina; La frecuencia cuya frecuencia está relacionada con la velocidad de rotación. La señal es una onda sinusoidal de la cual la amplitud depende del tamaño, la velocidad y la distancia del objetivo.
Ventajas
Una ventaja de los sensores VR es su aplicabilidad a aplicaciones de alta temperatura. Hay tipos específicos de sensores que son adecuados para funcionar con temperaturas de más de 300 ° C. Además, los sensores de VR son fáciles de usar y altamente confiables. Otra ventaja es que el sensor tiene una conexión de dos cables y, por lo tanto, a menudo se ajusta a las infraestructuras heredadas.
Desventajas
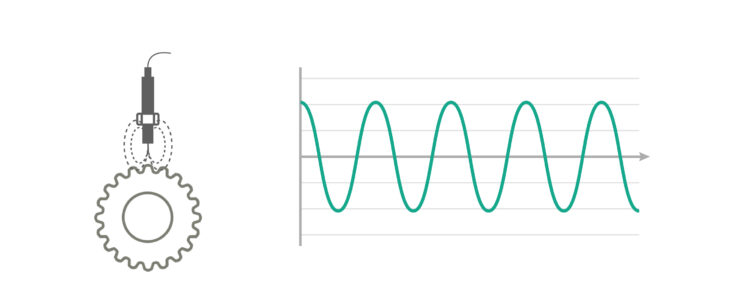
Una desventaja importante de los sensores VR es que la amplitud de la señal depende de un factor del tamaño, la velocidad y la distancia del objetivo. Si la velocidad es demasiado baja, el diente de engranaje demasiado pequeño o la distancia al material objetivo demasiado grande, la señal será aplanada y no utilizable. Por otro lado, si la velocidad es alta, el diente de engranaje grande o la distancia es pequeña, la señal mostrará pulsos altos (80Vrms). La aplicación y el posicionamiento de los sensores de VR requieren especial atención y experiencia para funcionar correctamente. Como estos tipos de sensores no funcionan bien con la baja velocidad, no son adecuados para la detección de baja o cero de velocidad.
Sensores de corrientes de Foucault (eddy current)
Un sensor de corriente de Foucault utiliza un campo electromagnético para medir los cambios en la distancia a un objeto. A medida que una rueda pole se mueve más allá del sensor, mide una variación en la distancia; Cerrar (diente) y lejano (muesca). La velocidad de rotación se puede determinar en función del tiempo entre estos eventos.
Ventajas
Una ventaja importante de los sensores de corriente de Foucault es que el principio de medición muestra tanto los pulsos como la posición con respecto a los dientes. Esto proporciona información sobre la distancia establecida a los dientes del objeto objetivo.
Los sensores de corriente de Foucault también están disponibles con una salida de corriente dinámica, que permite un cableado largo (hasta 1000 m). Los sensores con una salida de corriente dinámica se ven menos afectados por la impedancia del cable en comparación con los sensores de efecto de Hall, los sensores de corriente de Foucault basados en señales de voltaje y los sensores de VR.
Desventajas
El uso de los sensores de corriente de Foucault para mediciones de velocidad tiene una desventaja. A una velocidad alta, puede ocurrir la saturación, lo que hace que la forma de la señal se apline cada vez más. Cuando los dientes de engranajes se mueven más allá del sensor a alta velocidad, un sensor de corriente de Foucault apenas detecta una diferencia en las distancias. Cuanto mayor sea la frecuencia, menos eficaz un sensor de corriente de Foucault será para mediciones de velocidad.
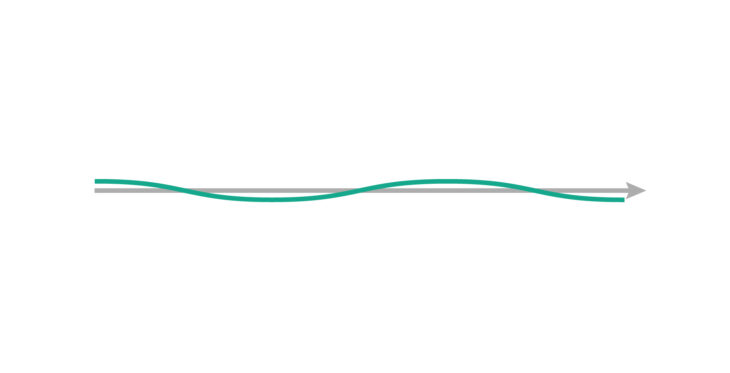
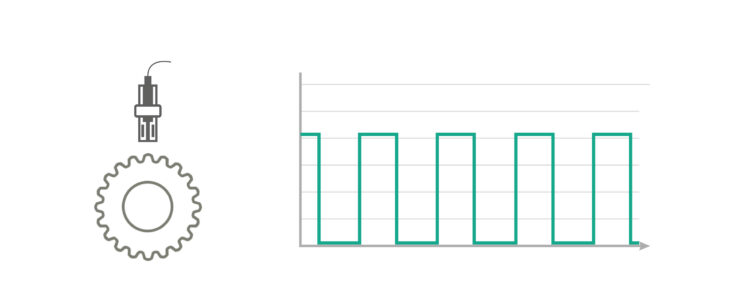
Sensores de efecto Hall
Un sensor de efecto Hall mide los cambios en el campo magnético del imán, causado por el material objetivo ferromagnético. Los sensores tienen acondicionadores de señal incorporados, que generan una señal de onda cuadrada clara. En contraste con los sensores de VR, los sensores de efecto Hall son sensibles al tamaño del flujo magnético en lugar de la velocidad a la que cambia. Los sensores de velocidad del efecto Hall tienen un amplio rango de medición y se pueden usar para medir piezas de baja velocidad o estacionarias y partes de alta velocidad.
Ventajas
Una ventaja de un sensor de efecto Hall es que el sensor proporciona directamente una salida digital que es fácil de transmitir y procesar. Otra ventaja es que los sensores de efecto Hall generalmente cuentan con el procesamiento de la señal interna. La señal se digitaliza y se amplifica, lo que lo hace menos susceptible a las interferencias electromagnéticas (EMI).
Desventajas
Debido a la electrónica incorporada, los sensores de efecto hall se limitan a aplicaciones que operan en temperaturas que van desde -40 ° C hasta +150 ° C. Además, los sensores de efecto Hall requieren una conexión de 3 cables. Además, el nivel de activación se define en el sensor de efecto Hall y no se puede cambiar.
Consulte también: Sistemas de protección contra sobvelocidad »