El estándar API 670 es un estándar de la industria y describe los requisitos mínimos para un sistema de protección de la máquina (MPS). Esto incluye, medir la vibración del eje radial, la vibración de la carcasa, la posición del eje axial, la velocidad de rotación del eje, la caída de la varilla del pistón, la referencia de fase, el sobrevelocidad y las temperaturas críticas de la máquina.
El estándar incluye requisitos relacionados con hardware (sensores y sistemas), instalación, documentación y pruebas. En este artículo, nos centramos únicamente en la parte que describe el sobrevelocidad y nos limita a esta norma. Se describen los elementos principales.
La definición de sobrevelocidad
Sobrevelocidad ocurre cuando la velocidad de rotación de una máquina giratoria, como una turbina de vapor o gas, excede sus límites de diseño. Las consecuencias de un evento de sobrevelocidad varían por tipo de máquina y por modelo. El tiempo que dura el evento de sobrevelocidad y el grado de sobrevelocidad en relación con el límite de diseño también es decisivo para las consecuencias.
Aunque los fabricantes generalmente le dan a la maquinaria un cierto margen de seguridad en el diseño con respecto a la velocidad máxima de rotación, un evento de sobrevelocidad puede provocar un desarrollo de daños rápidos y impactantes. Para evitar esto, es importante equipar la máquina con un sistema de monitoreo de sobrevelocidad.
Detección electrónica de sobrevelocidad
En el pasado, las máquinas fueron monitoreadas por la protección mecánica de sobrevelocidad, pero hoy en día la protección electrónica de sobrevelocidad es la norma. Por lo tanto, la API 670 solo describe los requisitos de los sistemas de detección electrónicos y los define de la siguiente manera:
Un sistema electrónico de detección de sobrevelocidad consiste en sensores de velocidad, fuentes de alimentación, relés de salida, procesamiento de señales y lógica de alarma / apagado / integridad. Su función es medir continuamente la velocidad de rotación del eje y activar sus relés de salida cuando se detecta una condición de sobrevelocidad.
Hardware separado y lógica
La API 670 describe que un sistema electrónico de detección de sobrevelocidad debe dedicarse exclusivamente a la detección de sobrevelocidad. El sistema debe aislarse de otros sistemas de monitoreo y protección y no se le permite compartir componentes. Esto asegura que el funcionamiento del sistema sea verificable y no depende de otros sistemas.
Tiempo de respuesta
Un sistema electrónico de detección de sobrevelocidad, para aquellas máquinas a las que se aplica el estándar API 670, debe consistir en tres circuitos de medición independientes. Para maximizar la seguridad y la disponibilidad de la máquina, se usa una votación de dos o tres (2oo3) para activar la función de disparo. En otras palabras, si al menos dos de los tres sensores detectan sobrevelocidad, la función de disparo se activará.
La votación está relacionada con la arquitectura de un sistema de viaje (1oo2, 2oo2, 2oo3, y así sucesivamente). Se puede definir como el número mínimo de “rutas” que deberían funcionar del número total de caminos disponibles dentro de la arquitectura. Por ejemplo, con una arquitectura 1OO2, al menos una ruta debe funcionar, mientras que con una arquitectura 2oo4, al menos dos caminos deben funcionar.
No hace falta decir que el tiempo de respuesta durante un evento de sobrevelocidad es muy importante. La API 670 describe que el sistema puede tardar hasta 40 milisegundos para detectar el sobrevelocidad y tener el interruptor de las salidas de relé. Cabe señalar que 40 milisegundos no siempre son lo suficientemente rápidos para evitar que el rotor alcance una velocidad por encima de sus especificaciones de diseño debido a la rampa.
Las siguientes acciones deben tener lugar dentro de estos 40 milisegundos:
- Los tres circuitos de medición (canales) miden la velocidad de rotación.
- Los valores medidos se comparan independientemente con el valor del disparo.
- La estructura de votación determina cuántos circuitos de medición han determinado un evento de sobrevelocidad.
- Cuando al menos dos de los sensores han detectado sobrevelocidad, el relé de salida debe cambiar.
En el diagrama a continuación, estos pasos se muestran esquemáticamente: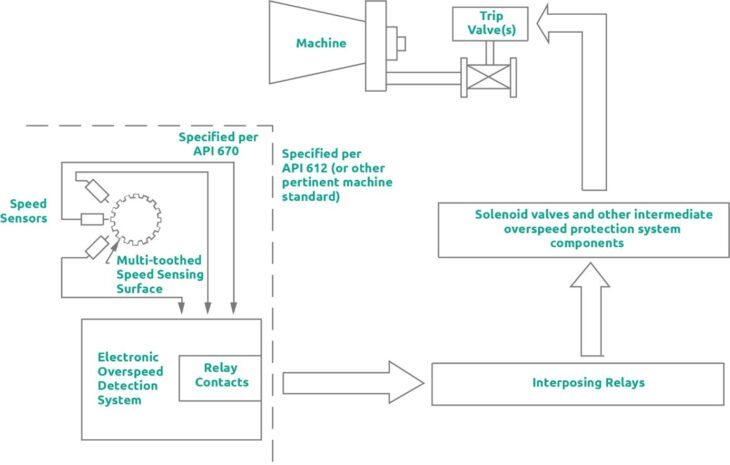
Representación esquemática de un sistema electrónico de detección de sobrevelocidad; Tres sensores apuntaron a la superficie de medición, conectados al sistema de detección donde la votación tiene lugar con un relé como salida.
Fuente: API Estándar 670
Speedsys; Sistema de protección de sobrevelocidad
Istec ha desarrollado SpeedSys: un sistema de protección de sobrevelocidad certificado por diseño. Nos despojamos de todas las funcionalidades adicionales y regresamos al núcleo de la protección de sobrevelocidad según lo definido por la norma API 670. El SpeedSys presenta un intervalo de prueba mínimo de 10 años, escalabilidad para una calificación de SIL superior a través de estructuras de votación y una arquitectura basada en transmisor en lugar de arquitecturas complejas basadas en bases. El SpeedSys ofrece el mismo nivel de protección que cualquier sistema basado en bastidor, pero es mucho más accesible financieramente para equipos giratorios más pequeños y más grandes.