Escolher o sensor de velocidade certo para a turbomáquina é de importância crucial para uma medição precisa e confiável. Afinal, o sinal do sensor é a entrada para um sistema de proteção de sobrevelocidade. Um sensor defeituoso leva a um sinal de entrada não confiável, que tem uma influência negativa sobre a precisão e confiabilidade do sistema de proteção.
Existem várias considerações que devem ser feitas para selecionar o sensor certo, que pode ser categorizado em considerações ambientais e relacionadas à máquina.
Considerações de máquinas:
1. Qual é a velocidade esperada min e max?
2. Qual é o alvo que é medido e quais são suas especificações?
3. Existem limitações sobre o peso e o tamanho no local de montagem?
4. Qual é o comprimento necessário do cabo?
Considerações ambientais:
1. Qual é a temperatura ambiente esperada?
2. A medição ocorre nas áreas perigosas da explosão (ATEX)?
3. são fortes campos eletromagnéticos presentes?
4. A medição ocorre em um ambiente corrosivo?
Para medições de velocidade industrial, existem três tipos principais de princípios de medição:
▪ Sensores de relutância variável (VR) – também conhecidos como: sensores passivos, sensores eletromagnéticos ou sensores de captação magnética (MPU).
▪ Sensores de corrente Foucault – também conhecidos como: sensores de proximidade ou sensores de deslocamento.
▪ Sensores de Efeito de Hall – também conhecidos como: sensores ativos.
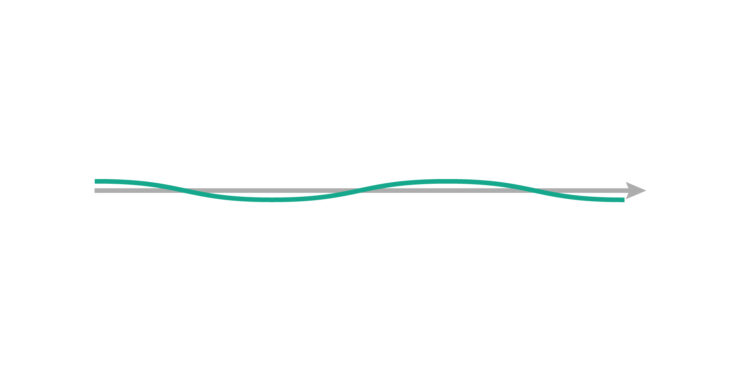
Sensores de relutância variável (VR)
Um sensor de VR usa um campo magnético para medir as alterações na distância entre a ponta do sensor e o objeto de destino. O sensor contém uma bobina que é enrolada em torno de um ímã que causa uma mudança no campo magnético (fluxo) e da bobina como os dentes de uma engrenagem passar o sensor. A engrenagem em movimento cria um fluxo variável que induz uma tensão na bobina; a frequência dos quais está relacionada à velocidade de rotação. O sinal é uma onda sinusoidal de que a amplitude depende do tamanho alvo, velocidade e distância.

Vantagens
Uma vantagem dos sensores VR é sua aplicabilidade a aplicações de alta temperatura. Existem tipos específicos de sensores que são adequados para funcionar com temperaturas de mais de 300 ° C. Além disso, os sensores de VR são fáceis de usar e altamente confiáveis. Outra vantagem é que o sensor tem uma conexão de dois fios e, portanto, geralmente se encaixa em infraestruturas legadas.
Desvantagens
Uma grande desvantagem dos sensores VR é que a amplitude do sinal depende de um fator do tamanho, velocidade e distância do alvo. Se a velocidade estiver muito baixa, o dente de engrenagem é muito pequeno ou a distância até o material alvo muito grande, o sinal será achatado e não é utilizável. Por outro lado, se a velocidade for alta, o dente de engrenagem grande ou a distância é pequena, o sinal mostrará altos pulsos (80Vrms). A aplicação e o posicionamento dos sensores VR exigem atenção especial e conhecimento para funcionar corretamente. Como esses tipos de sensores não funcionam bem com baixa velocidade, eles não são adequados para detecção baixa ou de velocidade zero.
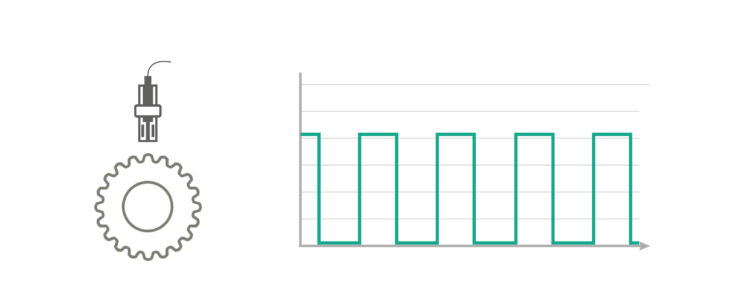
Sensores de corrente Foucault (eddy current)
Um sensor de corrente Foucault usa um campo eletromagnético para medir as alterações na distância até um objeto. Como uma roda de polo passa pelo sensor, ele mede uma variação na distância; Feche (dente) e longe (entalhe). A velocidade de rotação pode ser determinada com base no tempo entre esses eventos.
Vantagens
Uma grande vantagem dos sensores atuais de reildutores é que o princípio de medição mostra os pulsos e a posição em relação aos dentes. Isso fornece insights sobre a distância do conjunto dos dentes do objeto de destino.
Os sensores de corrente Foucault também estão disponíveis com uma saída de corrente dinâmica, que permite um cabeamento longo (até 1000m). Os sensores com uma saída de corrente dinâmica são menos afetados pela impedância do cabo em comparação com os sensores de efeito de hall, sensores de corrente de reilados com base em sinais de tensão e sensores de VR.
Desvantagens
O uso de sensores de corrente Foucault para medições de velocidade tem uma desvantagem. Em alta velocidade, pode ocorrer saturação, fazendo com que a forma do sinal se acostumize cada vez mais. Quando os dentes da engrenagem passarem pelo sensor em alta velocidade, um sensor de corrente paredenta mal detecta uma diferença em distâncias. Quanto maior a frequência, menos eficaz um sensor de corrente de um redemoinho será para medições de velocidade.
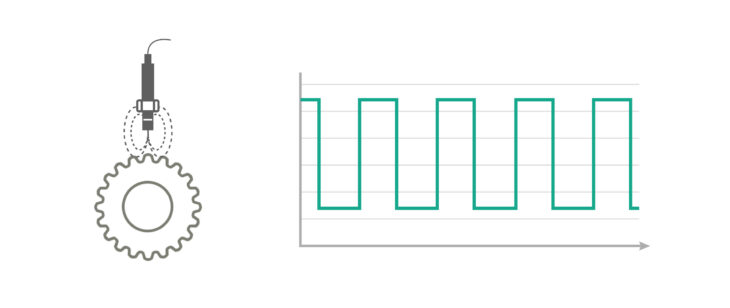
Sensores de efeito de Hall
Um sensor de efeito de Hall mede mudanças no campo magnético do ímã, causado pelo material alvo ferromagnético. Os sensores possuem condicionadores de sinal integrados, que geram um sinal de onda quadrado claro. Em contraste com os sensores de VR, os sensores de efeito de hall são sensíveis ao tamanho do fluxo magnético em vez da velocidade na qual ele muda. Os sensores de velocidade do efeito Hall têm uma ampla faixa de medição e podem ser usados para medir as peças de baixa velocidade ou estacionária e peças de alta velocidade.
Vantagens
Uma vantagem de um sensor de efeito Hall é que o sensor fornece diretamente uma saída digital que é fácil de transmitir e processar. Outra vantagem é que os sensores de efeito de hall geralmente apresentam processamento interno de sinal. O sinal é digitalizado e amplificado, tornando-se menos suscetível a interferências eletromagnéticas (EMI).
Desvantagens
Devido a eletrônica embutida, os sensores de efeito Hall são limitados a aplicações que operam em temperaturas variando de -40 ° C a +150 ° C. Além disso, os sensores de efeito Hall requerem uma conexão de 3 fios. Além disso, o nível de disparo é definido no sensor de efeito Hall e não pode ser alterado.
Verifique também: Sistemas de proteção contra sobrevelocidade »