O padrão API 670 é um padrão da indústria e descreve os requisitos mínimos para um sistema de proteção de máquinas. Isso inclui, medindo a vibração do eixo radial, a vibração do revestimento, a posição do eixo axial, a velocidade de rotação do eixo, a gota da haste do pistão, a referência de fase, as temperaturas de sobrevelocidade e a máquina crítica.
O padrão inclui requisitos relacionados ao hardware (sensores e sistemas), instalação, documentação e teste. Neste artigo, nos concentramos unicamente da parte que descreve sobrevelocidade e nos limitamos a esse padrão. Os principais elementos são descritos.
A definição de sobrevelocidade
Sobrevelocidade ocorre quando a velocidade de rotação de uma máquina rotativa, como uma turbina a vapor ou gás, excede seus limites de design. As conseqüências de um evento de sobrevelocidade variam por tipo de máquina e por modelo. O tempo que o evento de sobrevelocidade dura e o grau de sobrevelocidade em relação ao limite de design também é decisivo para as conseqüências.
Mesmo que os fabricantes geralmente dêem a maquinaria uma certa margem de segurança no projeto em relação ao excedente a velocidade máxima de rotação, um evento de sobrevelocidade pode levar ao desenvolvimento de danos rápidos e impactantes. Para evitar isso, é importante equipar a máquina com um sistema de monitoramento de sobrevelocidade.
Detecção eletrônica de sobrevelocidade
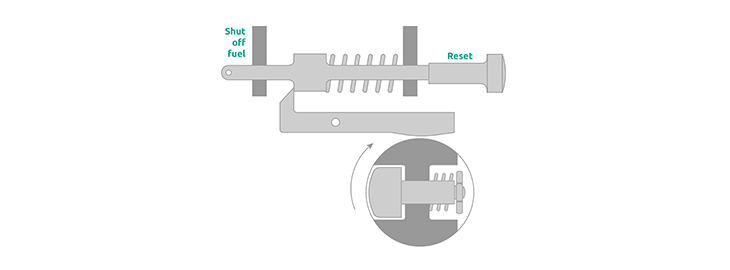
No passado, as máquinas foram monitoradas pela proteção mecânica de gastronomia, mas hoje em dia a proteção eletrônica é a norma. Portanto, a API 670 descreve apenas os requisitos dos sistemas de detecção eletrônica e define-os da seguinte forma:
Um sistema de detecção de sobrevelocidade eletrônica consiste em sensores de velocidade, fontes de alimentação, relés de saída, processamento de sinal e lógica de alarme / desligamento / integridade. Sua função é medir continuamente a velocidade rotacional do eixo e ativar seus relés de saída quando uma condição de sobrevelocidade for detectada.
Hardware e lógica separados
A API 670 descreve que um sistema de detecção de sobrevelocidade eletrônica deve ser exclusivamente dedicado à detecção de sobrevelocidade. O sistema deve ser isolado de outros sistemas de monitoramento e proteção e não é permitido compartilhar componentes. Isso garante que o funcionamento do sistema seja verificável e não dependente de outros sistemas.
Tempo de resposta
Um sistema de detecção de sobrevelocidade eletrónica, para as máquinas para as quais a API Standard se aplica, deve consistir em três circuitos de medição independentes. Para maximizar a segurança e a disponibilidade da máquina, uma votação de dois fora de três (2oo3) é usada para ativar a função de viagem. Em outras palavras, se pelo menos dois dos três sensores detectam de sobrevelocidade, a função de viagem será ativada.
A votação está relacionada à arquitetura de um sistema de viagem (1oo2, 2oo2, 2oo3 e assim por diante). Pode ser definido como o número mínimo de “caminhos” que devem funcionar fora do número total de caminhos disponíveis dentro da arquitetura. Por exemplo, com uma arquitetura de 1oo2 pelo menos um caminho deve funcionar, enquanto com uma arquitetura 2oo4 pelo menos dois caminhos devem funcionar.
Escusado sem dizer que o tempo de resposta durante um evento de sobrevelocidade é muito importante. A API 670 descreve que o sistema pode levar até 40 milissegundos para detectar o sobrevelocidade e ter o interruptor de saídas de relé. Deve-se notar que 40 milissegundos nem sempre é rápido o suficiente para impedir que o rotor atinja uma velocidade acima de suas especificações de design devido ao aumento.
As seguintes ações devem ocorrer dentro desses 40 milissegundos:
- Todos os três circuitos de medição (canais) medem a velocidade de rotação.
- Os valores medidos são independentemente comparados com o conjunto do valor da viagem.
- A estrutura de votação determina quantos circuitos de medição determinaram um evento de sobrevelocidade.
- Quando pelo menos dois dos sensores detectaram o sobrevelocidade, o relé de saída deve alternar.
No diagrama abaixo, essas etapas são mostradas esquematicamente:
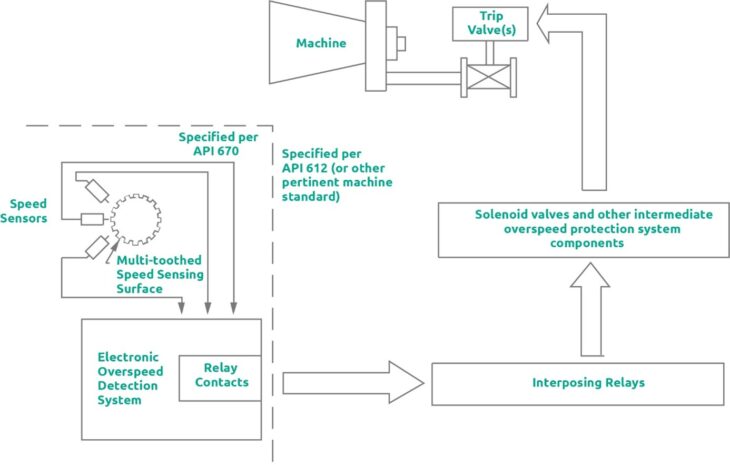
Representação esquemática de um sistema de detecção de sobrevelocidade eletrônica; Três sensores apontados para a superfície de medição, conectados ao sistema de detecção onde a votação ocorre com um relé como saída.
Fonte: API Standard 670
Speedsys – Sistema de proteção de sobrevelocidade
A Istec desenvolveu o Speedsys: um sistema de proteção de sobrevelocidade certificado por seu projeto. Declamos todas as funcionalidades adicionais e retornamos ao núcleo da proteção de sobrevelocidade conforme definido pelo padrão API 670. O Speedsys possui um intervalo de teste mínimo de 10 anos, escalabilidade para maior classificação SIL por meio de estruturas de votação e uma arquitetura baseada em transmissor, em oposição a arquiteturas complexas baseadas em rack. O Speedsys oferece o mesmo nível de proteção que qualquer sistema baseado em rack, mas é muito mais acessível financeiramente para equipamentos rotativos menores e maiores.